Advanced Robotics Projects
Final Project Video Submission for Brachiobot: A Brachiating Robot
Software
Arduino
Python/MicroPython
ROS
Hardware
Raspberry Pi 0, 4, Camera & Microphone
ESP8266
LiDAR, Ultrasonic, Force, & other sensors
3D Printing, Laser/waterjet cutting
Here is a compilation of projects I completed for my Advanced Robotics class, a graduate course taken in Fall'21.
Every 2-3 weeks, we formed small groups and were asked to build a robot that satisfied specific requirements, from brachiating across a monkey bar course to tossing a ball back and forth with multiple people.
This course taught me an incredible amount about rapid prototyping, system integration, and teamwork.
Break-io-bot
For the final project, each group constructed a brachiating robot that could traverse a monkey bar obstacle course.
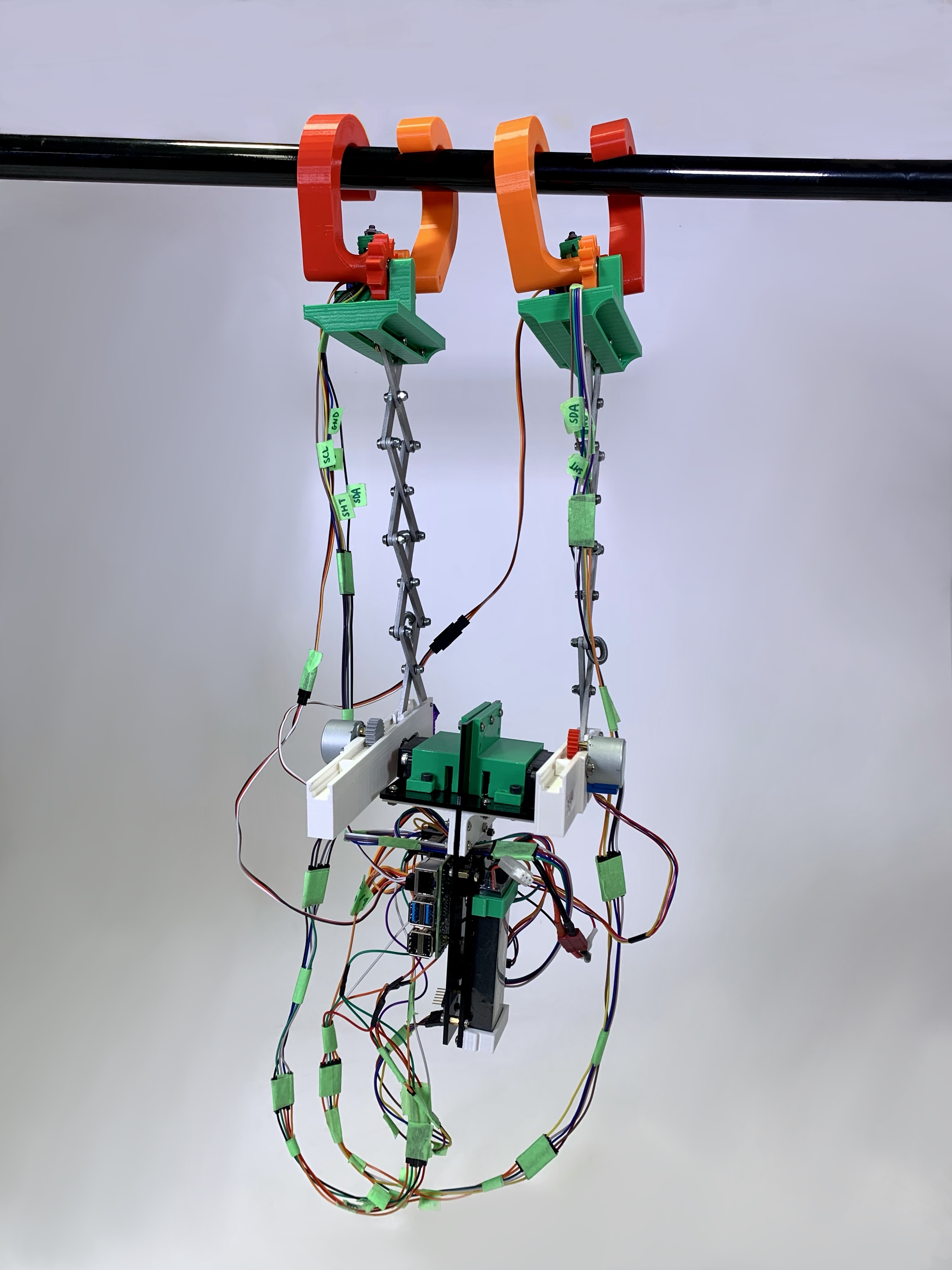
Hover over the image to see component descriptions!
My main contribution was designing a body that was lightweight, balanced, and could hold all the electronics. Key design features include:

Laser-cut interlocking frame secured with 3D printed brackets
Heat-set inserts
Servo mounts for continuous servo motors
Metal standoffs to mount the electronics
PacBot
PacBot is a human-interaction robot that plays ball with multiple users, drawing inspiration from arcade games like PacMan and Basketball.
The robot locates & tracks players using facial recognition. It uses image processing to detect the “go” signal (holding up all 10 fingers). Then, the robot releases the ball, shooting out between a set of flywheels. It waits for the player to return the ball through a hoop and then continues to the next player.
My main contribution to this robot was the code. Here is an image of the general code hierarchy & animations showing the facial recognition and image processing I incorporated into the robot.



Hobbes On the Go!
Hobbes on the Go! is a balancing mechatronic tiger robot. On top of a hoverboard-inspired design is a fully animated tiger puppet and tail. PID control was utilized to have the robot balance.
My main contribution was designing the hoverboard base. I used laser-cut plates and standoffs to mount the electronics, balancing the mass. The system moved using 2 3D printed wheels driven by continuous servos.


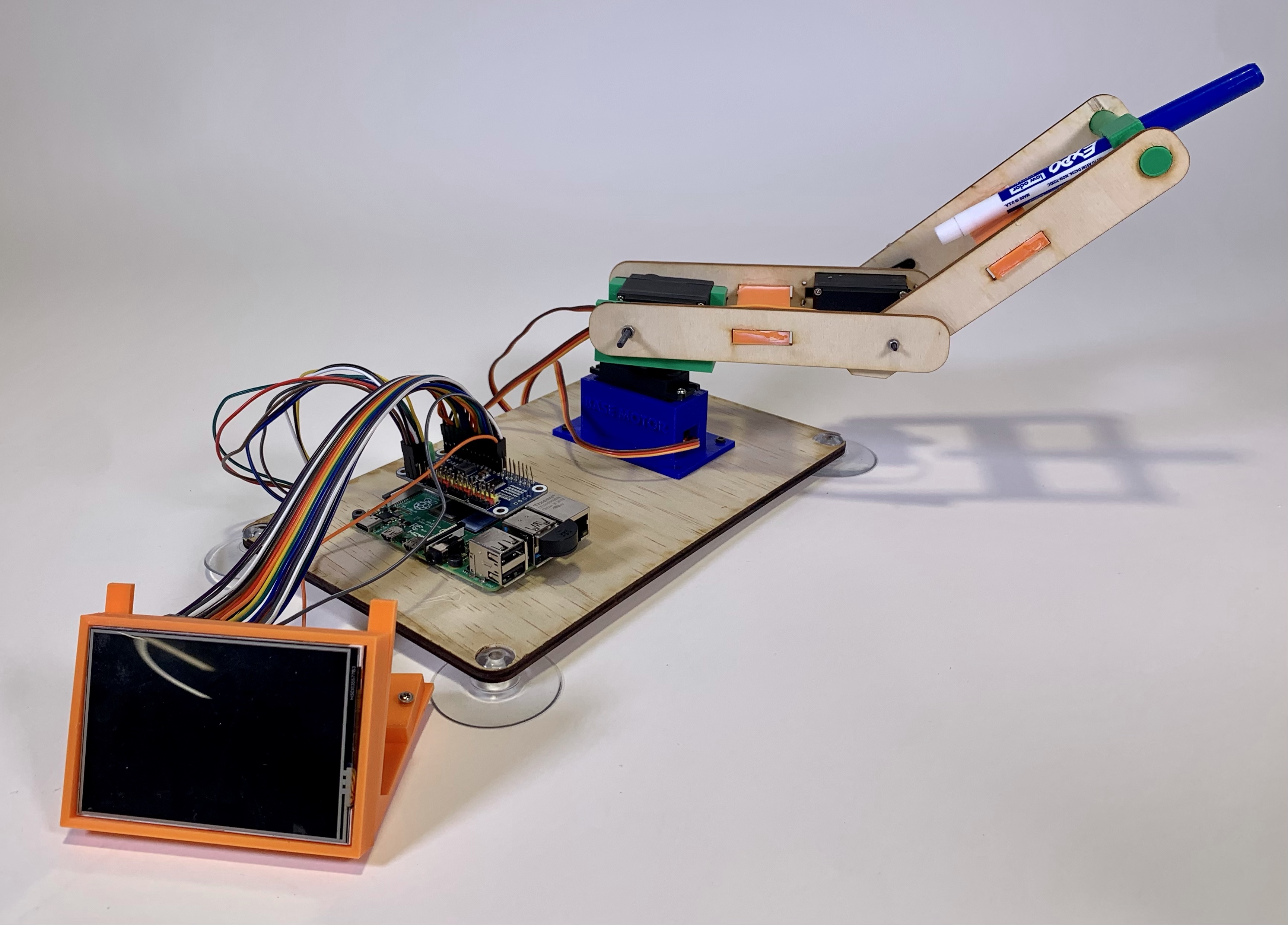
Assistive Tech for T-Rexes
Assistive Tech for T-Rexes is an initial writing robotics arm. Users can input their initials onto a Raspberry Pi connected touch screen, and forward kinematics are used to derive the corresponding spatial coordinates.
My main contribution was calculating the forward kinematics, using DH transformation matrices, graphical approaches, and Mathematica.